

22.08.2024
Farbe mit einer Digitalkamera messen
Das menschliche Auge besitzt in der Netzhaut drei verschiedene Farbrezeptoren, die im Wesentlichen im roten, grünen und blauen Spektralbereich empfindlich sind. Über den Sehnerv werden die in den Rezeptoren erzeugten Farbreize schließlich an das Gehirn weitergeleitet und als jeweilige Farbe interpretiert [1].
Da die Augen, deren spektrale Empfindlichkeit und Weiterverarbeitung individuell verschieden sind, wird Farbe von jedem Menschen subjektiv empfunden. Um Farbe objektiv beurteilen zu können, werden daher technische Hilfsmittel wie Farbmessgeräte oder auch registrierende Spektralphotometer mit diversem Zubehör verwendet.
Auch Digitalkameras erfassen die Farben verschiedener Objekte. Sie sollen in erster Linie "schöne Fotos" erzeugen, lassen sich jedoch auch über Umwege zur Farbmessung nutzen. In wieweit sie dabei von professionellen Farbmessgeräten abweichen können, soll in diesem Artikel an Beispielen von zwei Gelb- und Blautönen mit zwei Farbmessgeräten unterschiedlicher Messgeometrie sowie mit zwei Digitalkameras mit verschiedenen Sensortypen untersucht werden.
Farbmessgeräte
- Abb.1: Deckmalfarben bei Tageslicht
mit bewölktem Himmel.
mit bewölktem Himmel.
Hierbei werden zwei Messgeometrien unterschieden: 45/0 und d/8 [2]. Bei der 45/0-Geometrie wird die Probe unter einem 45° Winkel zum Detektor bestrahlt und das reflektierte Licht im 0° Winkel analysiert (Abbildung 2). Bei der d/8-Geometrie wird die Probe unter Verwendung einer Integrationskugel diffus bestrahlt und das im 8° Winkel, relativ zur Probennormalen (gestrichelte Linie in Abbildung 2), im Detektor analysiert.
Der Detektor ist jedoch in der Realität etwas komplexer als in der jeweiligen Skizze dargestellt: Es handelt sich um ein Beugungsgitter in Kombination mit einer Diodenzeile, so dass die Intensitätsverteilung des von der Probe reflektierten Lichts auf definierten Positionen der Zeile empfangen und somit wellenlängenabhängig erfasst werden kann. Da bewegliche Teile fehlen, erfolgen die Messungen und nachgeschalteten Auswertungen enorm schnell. Registrierende Spektralphotometer hingegen sind zwar deutlich langsamer als Diodenarray-Geräte, dafür sind sie in der Wellenlängenauflösung i.d.R. deutlich feiner als jene.
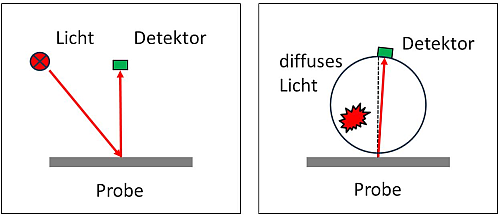
Abb.2: Schema einer 45/0-Geometrie (links) im Vergleich zur d/8-Geometrie eines Kugelmessgeräts (rechts).
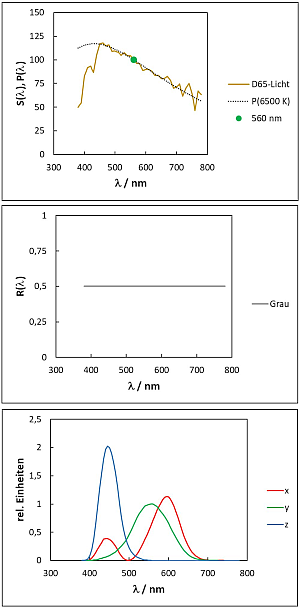
- Abb.3: Intensitätsverteilung von D65-Licht S(λ) als
Funktion der Wellenlänge nach [3] im Vergleich
zur Planck-Funktion P(6500 K) [4], die wie
nach [3] normiert wurde. Der grüne Punkt
markiert den Wert 100 bei 560 nm nach Normierung.
Abb.4: Konstruiertes Reflexionsspektrum eines
neutralen Grautons mit 50% Reflexion
(R = 0,5) im Sichtbaren.
Abb.5: Normspektralwertkurven x, y, z
in relativen Einheiten als jeweilige Funktion
der Wellenlänge für einen 10° Beobachter
(entspricht einem Objekt mit 90 mm im Abstand
von 50 cm) nach [3].
Die in der Norm [3] tabellierten Werte tragen keine Einheit, da sie auf den Wert für S(λ) bei λ = 560 nm normiert und mit 100 multipliziert wurden. Ohne diese Normierung müssten sie so wie die Planck-Funktion [4] in der Dimension Leistung pro Fläche pro Wellenlängenintervall dargestellt werden, also in der Einheit W m-2 nm-1.
Die Spektralverteilung von D65-Licht wurde in [3] festgelegt und stellt eine theoretische Verteilung dar. Daher ergeben sich Abweichungen zur normierten Planck-Funktion im kurzwelligen Bereich ab ca. 450 nm (Abbildung 3).
Neben D65 existieren noch andere Lichtarten wie z.B. D50 mit einer Farbtemperatur von 5000 K oder Lichtart A, welches Glühlampenlicht mit einer Farbtemperatur von 2856 K entspricht [3].
Um eine Farbe quantitativ zu charakterisieren, wird ihr Reflexionsspektrum benötigt. Hierzu wird i.d.R. das Messgerät mit einem Schwarz- und einem Weißstandard kalibriert, um die Reflexionsskala zwischen 0 und 1 bzw. 0 % und 100 % festzulegen. Abbildung 4 veranschaulicht ein konstruiertes Reflexionsspektrum für einen idealen Grauton mit 50 % Reflexion im sichtbaren Spektralbereich, um die einzelnen Schritte der Farbwertberechnung auf einfache Weise nachvollziehbar zu gestalten wie nachfolgend beschrieben.
Mit Hilfe eines Mikroprozessors wird das gemessene Reflexionsspektrum mit den Daten für D65-Licht sowie mit jeweils denen einer Normspektralwertkurve (Abbildung 5) für rot (x(λ)), grün (y(λ)) und blau (z(λ)) multiplikativ verrechnet und aufsummiert, um daraus Farbkoordinaten wie die Tristimuluswerte X, Y und Z zu erzeugen [2].
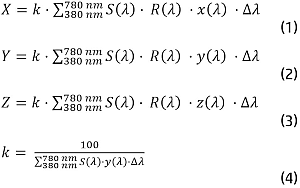
X, Y, Z: Normspektralwerte für einen 10° Beobachter (entspricht einem Objekt mit 90 mm Durchmesser, das im Abstand von 50 cm beobachtet wird)
k: Normierungskonstante
S(λ): Intensitätsverteilung der Lichtart in Abhängigkeit der Wellenlänge λ, hier D65-Licht nach [3]
R(λ): Reflexionsspektrum einer Probe
x(λ), y(λ), z(λ): Normspektralwertkurven für rot, grün und blau nach [3]
Δλ: Wellenlängenintervall, hier 5 nm
Eine solche Datenreduktion komprimiert das gemessene Reflexionsspektrum R(λ) einer Farbe in lediglich drei Werte (X, Y, Z), die diese für eine gegebene Lichtart und Messgeometrie eindeutig beschreiben.
Die Normspektralkurve y(λ) in Abbildung 5 ist in ihrem Maximum auf Eins normiert und ihr Flächeninhalt definiert somit die Werte der beiden anderen Kurven, deren Flächeninhalte ebenfalls gleich sind [5].
Für das konstruierte Grau aus Abbildung 4 mit R = 0,5 ergibt sich nach den Gleichungen 1 bis 4: X = 47, Y = 50 und Z = 54.
Ein Nachteil des XYZ-Farbraums besteht jedoch darin, dass geometrisch gleiche Farbabstände vom Betrachter nicht als visuell gleichabständig wahrgenommen werden, also Empfindungs-ungleichabständig sind. Um diesem Umstand besser gerecht zu werden, wurde der L*a*b*-Farbraum eingeführt. Dieser kann durch eine nicht-lineare Transformation aus dem XYZ-Farbraum erzeugt werden. In diesem sind die Farbabstände angenähert Empfindungs-gleichabständig [6]. Auf diese Weise wird versucht, den L*a*b*-Farbraum an der Wahrnehmung des menschlichen Auges auszurichten, bei der Empfindlichkeiten eher logarithmisch als linear skaliert sind.
Digitalkameras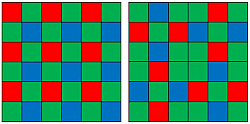
- Abb.6: Bayer-Sensor (links),
X-Trans-Sensor (rechts)
X-Trans-Sensor (rechts)
Eine Digitalkamera funktioniert etwas anders als ein Spektralphotometer. Ihr Bildsensor empfängt das von einem anvisierten Objekt reflektierte Licht, zerlegt es aber nicht spektral. Der Bildsensor ist stattdessen aus rot-, grün- und blau-empfindlichen Pixeln zusammengesetzt, über welche die Farben des fotografierten Objekts durch eine additive Mischung erzeugt werden.
Der Sensor einer Kamera zeigt somit eine gewisse Ähnlichkeit zur Netzhaut des menschlichen Auges, die wie jener eine Verteilung von im Wesentlichen drei verschiedenen Farbrezeptoren aufweist.

- Abb.7: Weiße Teflonplatte neben Gelb 1
bei D65-Licht und automatischem
Weißabgleich.
Der Farbraum einer Kamera kann meist als sRGB-Farbraum (sRGB = Standard RGB) gewählt werden. Dieser soll gewährleisten, dass verschiedene Kameras aber auch verschiedene Monitore und Displays (in etwa) die gleichen Farben erzeugen. Der sRGB-Farbraum ist auf vielen Geräten verfügbar und ermöglicht Transformationen in andere Farbräume wie XYZ oder L*a*b* [8].
Messungen mit einer Kamera
Mit Hilfe zweier kommerzieller Digitalkameras, einer mit Bayer-Sensor sowie einer mit X-Trans-Sensor, wurden vier Proben fotografiert: zwei unterschiedliche Gelbtöne (Gelb 1 und Gelb 2) und zwei unterschiedliche Blautöne (Blau 1 und Blau 2). Die Proben wurden in einer Bemusterungskabine unter D65-Licht platziert. Die Kameras wurden jeweils auf einem Stativ fixiert. Bei den Kameras wurde auf automatischen Weißabgleich eingestellt, damit die D65-Lichtart der Bemusterungskabine berücksichtigt werden konnte. Es wurde eine neutrale Filmsimulation gewählt, um Verfälschungen der Farben durch zu hohe oder zu geringe Sättigung zu vermeiden. Neben der jeweiligen Farbkarte wurde auch jeweils eine weiße Teflonplatte angebracht, damit nachträglich der Weißpunkt verschoben werden konnte.
Abbildung 7 zeigt eine Aufnahme von Gelb 1 im Innenraum der Bemusterungskabine bei D65-Licht. Auffällig ist die recht dunkle Erscheinung, die daraus resultiert, dass der Belichtungsmesser der Kamera stets versucht, auf einen mittleren Grauton einzuregeln. Das führt mitunter dazu, dass die eigentlich weiße Teflonplatte nun grau erscheint, wie in Abbildung 7 dargestellt. Auch das Gelb erscheint recht dunkel, wie in der gleichen Abbildung zu erkennen ist.
Nachträglicher Weißabgleich
Damit die ursprünglich weiße Teflonplatte auch wirklich weiß und nicht grau erscheint, lässt sich eine entsprechende Korrektur vornehmen. Unter Verwendung einer kostenlosen Bildbearbeitungssoftware wie z.B. GIMP kann ein Bereich der weißen Teflonplatte wie z.B. in Abbildung 7 mit dem Cursor angewählt und auf Weiß gesetzt werden. Nach diesem erscheint das Weiß dann auch als solches und liegt bei einem Grauwert von nahezu 255, dem Maximalwert. Alle anderen Farbwerte werden dann mitverschoben und das ursprüngliche Gelb erscheint nun auch wieder als solches (Abbildung 8 und 9).
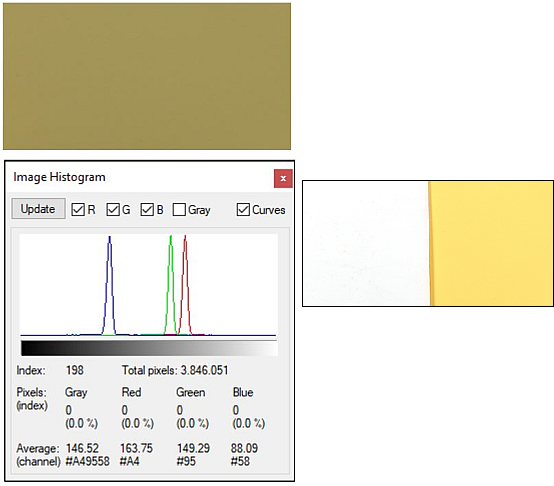
Abb 8: Gelb 1 bei D65-Licht und automatischem Weißabgleich mit Histogramm.
Abb. 9: Weiße Teflonplatte neben Gelb 1-Farbkarte nach Weißabgleich auf Teflon.
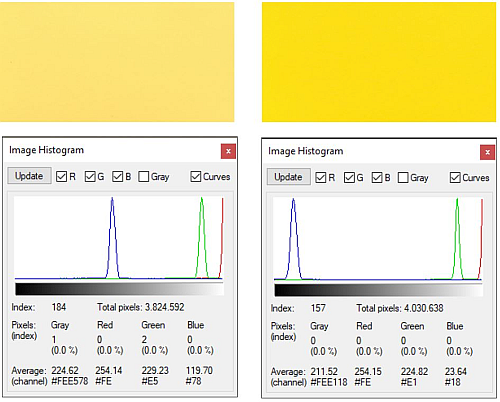
Abb.10: Gelb 1 nach Weißabgleich auf Teflon mit Histogramm.
Abb.11: Gelb 2 nach Weißabgleich auf Teflon mit Histogramm.
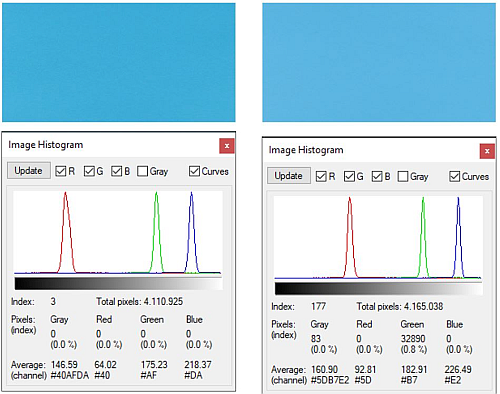
Abb.12: Blau 1 nach Weißabgleich auf Teflon mit Histogramm.
Abb.13: Blau 2 nach Weißabgleich auf Teflon mit Histogramm.
Vergleich der Farbwerte
Alle Proben wurden mit einem 45/0- sowie mit einem d/8-Farbmessgerät gemessen und die L*a*b*-Werte bestimmt. Aus den Fotos der Proben wurden nach Korrektur auf eine weiße Teflonplatte die RGB-Werte bestimmt und mittels der kostenlosen Software nixsensor.com in L*a*b*-Werte für D65-Licht und einen 10°-Beobachter umgerechnet. Die Werte sind in Tabelle 1 zusammengefasst.
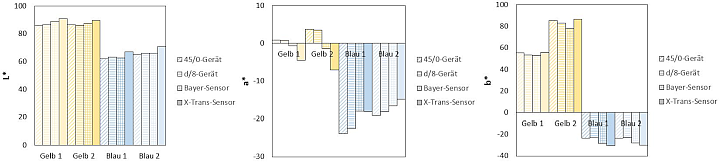
Abb.14: L*-Werte, Abb.15: a*-Werte, Abb. 16: b*-Werte jeweils für zwei Gelb- und Blautöne als Vergleich
zwischen verschiedenen Farbmess-Geometrien und unterschiedlichen Kamerasensortypen (v.l.n.r).
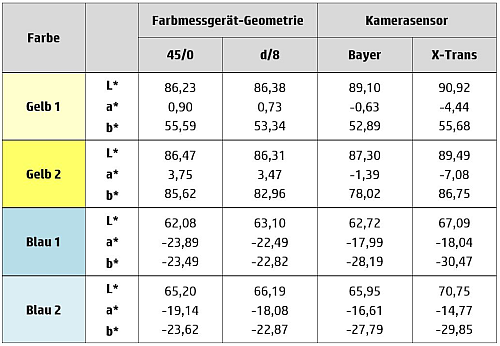
Tab1: Vergleich der Farbwerte
Ohne nachträgliche Weißkorrektur hätte der X-Trans-Sensor für das Farbfeld von Gelb 1 aus Abbildung 7 die Werte L* = 61,75, a* = -2,96 und b* = 34,11 geliefert, also völlig andere als nach der Korrektur wie man Abbildung 10 und Tabelle 1 entnehmen kann.
Bei den Helligkeitswerten (L*) sind die Unterschiede der beiden Messgeometrien relativ gering. Bei den beiden Kameras liefert die mit dem X-Trans-Sensor durchweg etwas höhere Werte als die mit dem Bayer-Sensor.
Bei den beiden Gelbtönen zeigen die mit beiden Kameras ermittelten a*-Werte jedoch große Abweichungen zu den mit den Farbmessgeräten bestimmten Werten. Während beide Messgeometrien schwach positive a*-Werte liefern (Rot-Anteile), bestimmen beide Kamaerasensoren negative a*-Werte, also Grün-Anteile. Bei den beiden Blautönen stimmen die Vorzeichen aller a*-Werte überein. Zudem liefern sowohl die beiden Messgeometrien der Farbmessgeräte als auch die beiden Kamerasensoren nur relativ geringe Unterschiede in den a*-Werten für beide Blautöne.
Bei den beiden Gelbtönen liegen die b*-Werte für den X-Trans-Sensor rel. dicht an denen der beiden Farbmessgeräte. Beim Bayer-Sensor fallen die b-Werte kleiner aus als die der Farbmessgeräte. Für die Blautöne finden sich nur sehr geringe Unterschiede bei den verschiedenen Messgeometrien. Etwas größer sind die Unterschiede für die beiden Kamerasensoren. Beide Sensortypen liefern jedoch b*-Werte für Blau, die negativer sind als die der Farbmessgeräte.
Da bei Farbmessgeräten die Absolutwerte (L*a*b*) unterschiedlicher Messgeometrien nicht verglichen werden sollten, gibt ein Vergleich der jeweiligen Farbabstände (Eab*) eine bessere Orientierung zu den Farbabweichungen der beiden Kameratypen sowie der beiden Messgeometrien der Farbmessgeräte. Die Kamera erfasst über das Objektiv einen größeren Raumbereich als ein 45/0-Farbmessgerät, aber noch immer einen kleineren Raumbereich als die d/8-Geometrie, von daher liegt sie wahrscheinlich irgendwo zwischen denen der beiden Farbmessgeräte.
Die jeweiligen Farbabstände zwischen den beiden Gelb- sowie den beiden Blautönen wurden nach Gleichung 5 berechnet:
![]()
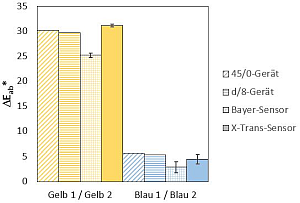
- Abb.17: ΔEab*-Werte für zwei Gelb- und Blautöne
als Vergleich zwischen verschiedenen Farbmess-
Geometrien und unterschiedlichen Kamerasensortypen
Für beide Messgeometrien sind die Unterschiede in den Eab*-Werten sowohl für Gelb als auch für Blau relativ gering, also 0,5 für das Gelbpaar und 0,2 für das Blaupaar. Bei den beiden Sensortypen fallen diese Unterschiede jedoch deutlich größer aus. Während der Bayer-Sensor kleinere Eab*-Werte als die der Farbmessgeräte liefert, d.h. er liegt um 4,8 für das Gelbpaar und um 2,7 für das Blaupaar unterhalb des jeweiligen Mittelwerts beider Farbmessgeometrien (Eab* = 30 für das Blaupaar und Eab* = 5,6 für das Gelbpaar).
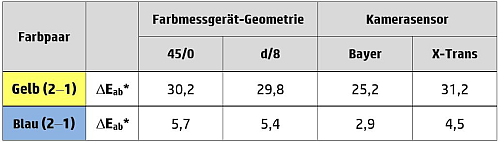
Tab.2: Vergleich der Farbabstände innerhalb der beiden Farbpaare.
Fazit
Farbmessungen mit Hilfe von Digitalkameras sind möglich, sofern Abstriche in der Genauigkeit hingenommen werden können. Hierbei sind sie für vergleichende Messungen zwischen einer Farbvorlage und der zu prüfenden Farbe über den Farbabstand E*ab durchaus akzeptabel. Die Bestimmung von Absolutwerten wie L*a*b* sollte jedoch besser mit Farbmessgeräten erfolgen.
Zu beachten ist, dass eine definierte Lichtart oder aber zum Zeitpunkt der Aufnahmen gleiche Lichtbedingungen vorliegen müssen, sonst wird eine Vergleichbarkeit schwierig bis unmöglich. In das jeweilige Bild sollte ein Weißstandard eingebracht werden, über den nachträglich eine Korrektur erfolgen kann - ohne diese werden deutlich andere Farbwerte erhalten. Die verwendete Filmsimulation sollte möglichst neutral sein, sonst drohen Farbverfälschungen durch zu starke Ent- oder Übersättigung der Farben.
Bei der nur geringen Farbauswahl, die untersucht wurde, hat die Kamera mit X-Trans-Sensor eine bessere Übereinstimmung der Eab*-Werte mit denen der Farbmessgeräte geliefert als die Kamera mit Bayer-Sensor. Dies kann bei anderen Farben sowie anderen Kameramodellen mit Bayer-Sensor möglicherweise auch wieder anders ausfallen. Zudem ist auch denkbar, dass die Unterschiede der beiden verschiedenen Kameras nicht unbedingt durch die Sensoren, sondern durch das jeweilige Farbmanagement der Gerätehersteller bedingt werden.
Literatur
- W. Schmidt, Optische Spektroskopie, VCH-Verlagsgesellschaft mbH, 1994
- H. Loos, Farbmessung, Verlag Beruf + Schule in Itzehoe, 1989
- DIN 5033-7, Farbmessung - Teil 7: Messbedingungen für Körperfarben, 2014
- H. Kuchling, Taschenbuch der Physik, Verlag Harri Deutsch, Thun und Frankfurt, 1988
- C. Gehrtsen, H. Vogel, Physik, Springerverlag, Berlin, 1993
- DIN EN ISO / CIE 11664-4, Farbmetrik - Teil 4: CIE 1976 L*a*b* Farbraum, 2020
- Bayer-Sensor
- RGB-Farbraum